Ersterstellung: 22.03.2021
letzte Bearbeitung: 2021-2026
Vom rotierenden Draht bis zum Trommelanker – Die Entwicklung des Gleichstrommaschine:
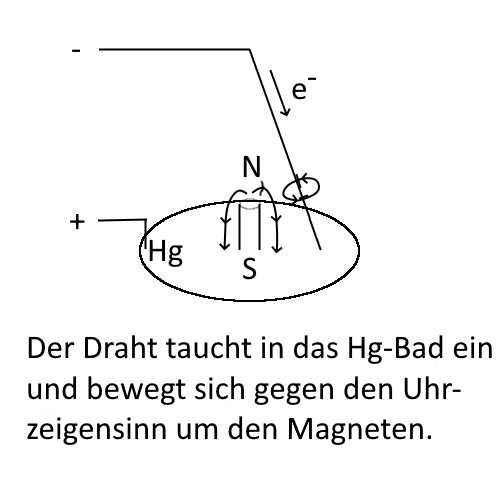
Der erste Elektromotor war ein Gleichstrommotor. Im Jahr 1821 erfand ihn der englische Physiker und Chemiker Michael Faraday, durch die Erfindung eines in ein Quecksilberbad eintauchenden Leiters der sich um einen darin stehenden Stabmagneten herum dreht. Eine Drehung eines Leiters um einen Stabmagneten bzw. eines Stabmagneten um einen Leiter, findet nur dann statt, wenn der Leiter bzw. der Stabmagnet nahezu parallel senkrecht zu dem Stabmagneten bzw. zu dem Leiter aufgehängt ist. Der französische Physiker André Marie Ampère stellte im Jahr 1820 fest, dass eine Kompassnadel sich immer quer senkrecht zum Strom bzw. Leiter ausrichtet. Hierbei existiert keine resultierende Lorentzkraft die die Kompassnadel bzw. den Stabmagneten herum rotieren lässt. Wenn aber Draht und Stabmagnet zueinander fast parallel senkrecht in ein Quecksilberbad eintauchen, existiert vom Magnetfeld des Stabmagneten herrührend eine Ebene im allerseits fast 90°-Winkel auf dem Gleichstrom bei der sich die Magnetfeldlinien des Stabmagneten in die gegenteilige Richtung wenden, weil sie ja vom inneren des Stabmagneten über den hier Nordpol nach außen dringen. Das bewirkt, dass sich auf der weg vom Betrachter liegenden Seite das Magnetfeld mit dem Gleichstrommagnetfeld subtrahiert und auf der am Betrachter liegenden Seite addiert mit dem Ergebnis dass eine resultierende Lorentzkraft, die gegen den Uhrzeigersinn gerichtet ist, daraus erzeugt wird.
Im Jahr 1822 erfand der ebenfalls Engländer Peter Barlow das Barlow-Rad. Es ist das umgekehrte Prinzip des Unipolargenerators, der 1832 von Michael Faraday erfunden wurde, nachdem er 1831 das elektrophysikalische Phänomen der elektromagnetischen Induktion entdeckte.
Eine rotierende Leiterschleife als Generator, die in einem homogenen Magnetfeld aufgehängt ist, induziert Wechselspannung. Wenn man sie an zwei Schleifringen anschließt, wird auch Wechselspannung entnommen.
Wenn man sie an einen Kommutator mit zwei Kommutatorblechen anschließt, wird pulsierende Gleichspannung entnommen.
Macht man bei der Leiterschleife mehrere Windungen so hat man eine Spule. Die einlagige Spule = das Solenoid wurde 1820 von dem André Marie Ampère erfunden. Der Elektromagnet wurde von dem Engländer William Sturgeon im Jahr 1824 erfunden wobei die Spule einen Eisenkern umwickelte. Der Eisenkern dient der Feldverstärkung, da Eisen wie Kobalt und Nickel und die Heusler´schen Legierungen und noch andere Elemente ferromagnetisch ist. Ein heutiger Elektromagnet besteht aus einer Spule aus einem mit einem durchsichtigen und elastischen Kunststoff lackierten Kupferdraht der um einen Eisenkern gewickelt ist. Der Eisenkern ist bei Gleichstrom aus ganzem Eisen und bei Wechselstrom aus aufeinander geschichteten voneinander durch Lack isolierten Eisenblechen, die längs der Richtung des Statormagnetfeldes gerichtet sind.
Nun werden die Spulen jeweils gleichsinnig auf zwei gegenüberliegende Stäbe aufgewickelt. Diese Anordnung wurde von Ányos Jedlik aus Ungarn in den Jahren 1827 bis 1829 erfunden. Im Jahr 1856 wurde der Doppel-T-Anker von Werner von Siemens, aus Lenthe (heute Gehrden) bei Hannover, erfunden. Siemens erfand auch die Polschuhe für das Statormagnet.
Das Lorentz-Kraft-Gesetz lässt sich als direktes und als indirektes Gesetz beschreiben. Es sagt folgendes: Wenn ein stromdurchflossener Leiter sich in einem Magnetfeld befindet, dann überlagert sich sein Magnetfeld mit dem Statormagnetfeld. Es addieren sich die Magnetfeldlinien dort wo sie mit gleicher Richtung den Raum durchlaufen. Die Magnetfeldlinien subtrahieren sich dort wo sie in entgegengesetzter Richtung den Raum durchlaufen. Nun wird der Leiter von dort weggedrückt wo die Magnetfeldlinien sich addieren und dort hingezogen wo sie sich subtrahieren. Das direkte Lorentzkraft-Gesetz liefert die tiefstliegende Erklärung für die Funktion des Elektromotors.
Beim Doppel-T-Anker-Motor und beim Dreifach-T-Anker-Motor werden die Elektronenstromrichtungen und Kräfte zunächst mit dem indirekten Lorentz-Kraft-Gesetz erklärt, nämlich dem Gesetz, dass gleichnamige Magnetpole sich abstoßen und ungleichnamige Magnetpole sich anziehen. Dieses indirekte Gesetz folgt aus dem direkten Lorentz-Kraft-Gesetz. Das ist dadurch erklärt, dass sich die Magnetfeldlinien zwischen zwei gegenüberliegenden ungleichnamigen Polen gegenseitig aufheben und sich zwischen den beiden Polen entlangstrecken. Darum ziehen sich zwei ungleichnamige Pole an. Wenn sich zwei gleichnamige Pole gegenüberstehen liegen die Feldlinien in gleicher Richtung nebeneinander. Deswegen stoßen sich gleichnamige Pole ab. Die magnetischen Feldlinien verlaufen im Kreis und zwar vom magnetischen Nordpol zum magnetischen Südpol und innerhalb des Kerns des Magneten vom magnetischen Südpol zum magnetischen Nordpol und so fort. Am magnetischen Nordpol kommen die magnetischen Feldlinien heraus. Am magnetischen Südpol versammeln sich wieder alle magnetischen Feldlinien.
Jeder Elektromotor besteht aus Ständer = Joch = Stator = unbeweglicher Teil und Läufer = Anker = Rotor = beweglicher Teil. Die mechanische Kraft, = die Lorentz-Kraft, des Elektromotors wird aus der Wechselwirkung des Rotormagnetfeldes mit dem Statormagnetfeld erzeugt.
Beim Doppel-T-Anker besteht, wenn man ihn als Elektromotor betreibt das Problem, dass er nicht aus allen Stellungen einen selbständigen Anlauf besitzt. Der Dreifach-T-Anker ist die Lösung für dieses Problem.
Im Jahr 1872 erfand Friedrich Hefner-Alteneck aus Aschaffenburg/Franken/Mittel-Süddeutschland den Trommelanker. Der Trommelanker gehört zu einem anderen Ankeruntertyp als der Dreifach-T-Anker. Der Trommelanker ist anders gewickelt wie der Dreifach-T-Anker. Doppel-T-Anker, Dreifach-T-Anker und Trommelanker sind Bezeichnungen für den Rotor der Maschine. Im Ständer unterscheidet sich die Dreifach-T-Anker-Maschine nicht von der Trommelanker-Maschine. Die Übergruppe des Dreifach-T-Anker-Motors nenne ich „T-Anker-Spulen-Motor“ und die Übergruppe des Trommelanker-Motors nenne ich „Rotor-Spulen-Motor“, weil beim Dreifach-T-Anker-Motor die Spulen um die T-Anker gewickelt sind und beim Trommelanker-Motor sind die Spulen um den ganzen Rotor herum, wie bei der rotierenden Leiterschleife, gewickelt. Beim Rotor-Spulen-Motor ist der selbständige Anlauf aus allen Ankerstellungen ab einer Anordnung von zwei um 90° zueinander versetzten Spulen, die mit 2 mal 2 Kommutator-Blechlamellen kontaktiert sind, möglich.
Der T-Anker-Spulen-Motor erklärt sich eigentlich nur durch das indirekte Lorentz-Kraft-Gesetz, weil in Bezug auf das direkte Lorentz-Kraft-Gesetz widersprüchliche Kräfte auftreten. Der Rotor-Spulen-Motor, einschließlich der rotierenden Leiterschleife, erklärt sich durch das direkte und indirekte Lorentz-Kraft-Gesetz.
Es soll hier zuerst darauf eingegangen werden wie der Dreifach-T-Anker gewickelt und gebaut ist und dann darauf wie der Trommelanker gewickelt und gebaut ist.
Und nun zum Dreifach-T-Anker-Motor bzw. T-Anker-Spulen-Motor zurück:
Unter den T-Anker-Spulen-Motoren ist glaube ich der Dreifach-T-Anker-Motor am verbreitetsten. Ab dem Dreifach-T-Anker-Motor kann man auch einen Vierfach-T-Anker-Motor bauen. Es sind ab dem Dreifach-T-Anker-Motor damit auch die geraden Ankerzahlen möglich.
Die Spulen die auf den T-Ankern aufgebracht sind, sind jeweils gleichsinnig auf den T-Ankern aufgewickelt und bei allen T-Anker-Spulen-Motoren in Reihe in einen Kreis geschaltet. Zwischen den Spulen bzw. T-Ankern wird der Draht jeweils einmal herausgeführt und mit einer Kommutator-Blechlamelle kontaktiert. Die beiden Bürsten bzw. Schleifkontakte sind Oben und Unten, also an der Seite des Nord-Pols und des Süd-Pols des Ständermagneten bei einer Maschine mit einem Polpaar. An der Seite des Nord- und Süd-Pols muss die Magnetfeldrichtung und damit die Stromrichtung in einer Ankerspule ins Gegenteil wechseln. Auf der linken Seite werden alle Ankermagneten nach Unten oder nach Oben gezogen und gedrückt. Auf der rechten Seite werden alle Ankermagnete nach Oben oder nach Unten gezogen und gedrückt.
Die Fläche des Schleifkontaktes darf nicht so klein sein, dass sie kontaktlos zwischen zwei Kommutator-Blechlamellen liegen kann. Der Schleifkontakt muss immer auf mindestens einer Kommutator-Blechlamelle liegen. Sonst ist der selbständige Anlauf aus allen Ankerstellungen nicht gewährleistet.
Die Wicklung beim Trommelanker d.h. beim Rotor-Spulen-Motor ist anders als beim T-Anker-Spulen-Motor. Wie gesagt, hat man beim Dreifach-T-Anker 3 Spulen die jeweils gleichsinnig aufgewickelt sind. Beim Trommelankermotor sind die Spulen nicht gleichsinnig um jeweils einen T-Anker herum gewickelt, was bei den T-Anker-Spulen-Motoren der Fall ist, sondern die Spulen sind, wie beim Motor mit der rotierenden Leiterschleife, jeweils gleichsinnig um den ganzen Rotor herum gewickelt.
Bei einem kleinen Trommelanker wird, bei einer geraden oder auch ungeraden T-Ankerzahl, der Draht jeweils ein mal durch die Nut zwischen den T-Ankern hindurchgeführt und anschließend auf die Gegenseite des gesamten Ankerrades = Rotors, aber hier nicht direkt gegenüber sondern schräg gegenüber, geführt, durch die Nut zwischen den T-Ankern geführt, dies wird mehrfach wiederholt, so dass eine Spule entsteht und dann wieder auf die vorherige Seite zurück, weiter durch die nächste Nut zwischen zwei T-Ankern und dann wieder eine Nut weiter auf der hier schrägen Gegenseite und so fort und dies mehrfach wiederholt, so das eine Spule entsteht, bis alle Nuten des Rotors die sich um den Rotor herum befinden mit Draht durchzogen sind. Für eine Spule werden an den Enden zwei Kommutator-Blechlamellen kontaktiert.
Ein einfacherer Trommelanker-Motor ist so gestaltet wie die am Anfang dieses Textes genannte rotierende Leiterschleife, nämlich dass jeweils eine Spule, die über den ganzen Rotor geht und jeweils einmal an der einen Seite und der gegenüberliegenden Seite des Ankerrades an einem T-Anker vorbeigeführt wird und den T-Anker nicht wie beim T-Anker-Spulen-Motor umrundet, an den Drahtenden jeweils mit einer Kommutator-Blechlamelle kontaktiert ist, so dass für eine Spule zwei sich gegenüberstehende Kommutator-Blechlamellen vorhanden sind. Um das hierbei auftauchende Kurzschluss- oder Nullkontakt-Problem zu beseitigen, ist mindestens noch eine weitere Spule notwendig, so dass bei zwei Spulen die Spulen sich mit 90° gegenüberstehen und insgesamt vier Kommutator-Blechlamellen vorhanden sind.
Eine weitere Wicklungsart für die Trommelanker-Maschine ist die Schleifenwicklung und die Wellenwicklung. Wie solche Wicklungen aufgebaut sind, ist z.B. dem Lehrbuch “Wicklungen elektrischer Maschinen” von F. Heiles, Springer-Verlag Berlin, 1953, Nachdruck 2014, auf Seite 128-132, oder dem Lehrbuch “Die Wicklungen elektrischer Maschinen” von T. Königshofer, Verlag Walter de Gruyter, 1969, Nachdruck 2020, auf Seite 102-116 zu entnehmen. Die Schleifenwicklung ist noch leicht zu verstehen aber die Wellenwicklung bereitet mir Schwierigkeiten.
Bei einem Trommelankermotor mit 2 Magnetpolen im Ständer (d.h. mit einem Polpaar) liegen die 2 Schleifer bzw. Bürsten im 90°-Winkel gegenüber (d.h. zwischen) den zwei Magnetpolen des Motors, wenn die Drähte nicht versetzt sind. Bei der Kommutatorlamelle die am Schleifer anliegt geht der Elektronenstrom in der oberen Spule z.B. nach hin zum Betrachter und der unteren Spule dann nach weg vom Betrachter. Somit kehrt sich die Stromrichtung am Schleifer (und damit die Kraftrichtung) ins Gegenteil.
Der Trommelankermotor lässt sich mit dem direkten und dem indirekten Lorentz-Kraft-Gesetz erklären. Die draufsichtseitigen Drähte die durch die Nut gehen liegen so, dass bei Stromdurchfluss der Anker vom Statormagnetfeld nach links oder rechts gedrückt wird. Die auf dem Ankerrad gegenseitigen Drahtbereiche die auf der Unterseite durch die Ankernut durchlaufen, werden von dem Statormagnetfeld nach rechts oder links also in die Gegenseite gedrückt. Somit dreht sich das Ankerrad nach links oder rechts.
Zénobe Gramme hatte wohl mit der Erfindung des Ringankers den Gedanken (wahrscheinlich aufgrund des mehr gewordenen Wissens im Bereich Elektrophysik) gehabt nicht mehr das indirekte, sondern das direkte Lorentz-Kraft-Gesetz anzuwenden. Friedrich Hefner-Alteneck hatte diesen Gedanken anzunehmenderweise aufgegriffen und die Wicklungen am Ankerrad noch verbessert dadurch, dass er die rückläufigen Drähte so wickelte, dass sie auch Lorentz-Kraft erzeugen und so eine doppelte Kraftausbeute erreicht wird.
Der Trommelanker erreicht glaube ich höhere Drehzahlen wie ein Dreifach-T-Anker.
Das liegt glaube ich daran, dass beim Dreifach-T-Anker-Motor nach dem direkten Lorentzkraft-Gesetz, widersprüchliche Kräfte auf die Anker wirken. Nur nach dem indirekten Lorentzkraft-Gesetz sind die Kräfte beim Dreifach-T-Anker-Motor eindeutig.
Der 3-T-Anker-Motor und der Trommelanker-Motor kann für Gleichstrom und auch für Wechselstrom mit einer niedrigen Frequenz verwendet werden. Eine niedrige Frequenz deshalb, weil bei einer hohen Wechselstromfrequenz von über 1 kHz der Skin-Effekt auftritt und außerdem eine zu weite Phasenverschiebung zwischen dem Strom im Ankerrad und dem Strom in der Statorspule auftritt.
Beim Nebenschluss-Motor wird die Statorspule parallel zum Ankerrad geschaltet. Beim Reihenschluss-Motor wird die Statorspule in Reihe zum Ankerrad geschaltet.
Die Trommelanker-Maschine und die Dreifach-T-Anker-Maschine als Generator:
Jeder Motor läuft auch immer als Generator und umgekehrt. Das stellte Emil Lenz aus dem heutigen Estland im Jahr 1830 fest. Dies gilt für elektrodynamische Maschinen. Ob dies auch für elektrostatische Maschinen gilt, weiß ich nicht. Das Zusammenwirken der Motor- und der Generatorfunktion bei entweder Motorbetrieb oder Generatorbetrieb wird in dem Text „Lorentzkraft und Induktion“ erklärt. Die Generatorfunktion beim Dreifach-T-Anker-Motor ist schwieriger zu erklären als beim Trommelanker-Motor.
Die Trommelanker-Maschine als Generator:
Die Generatorfunktion bei der Trommelanker-Maschine erkläre ich hier kurz anhand der Vorstellung eines einzelnen herausgegriffenen Elektrons: Der Leiter der senkrecht durch die Bildebene hindurchragt bzw. das Elektron bewegt sich im oberen Rotorteil z.B. nach links. Das Statormagnetfeld geht von oben nach unten von Nord nach Süd: Die Feldlinien gehen kreisrund um das Elektron herum. Wenn man das mit der Linken-Faust-Regel nachbildet, merkt man, dass die Feldlinien hinter dem Elektron sich subtrahieren und vor dem Elektron sich addieren. Das Elektron wird nun infolgedessen in die Bildebene hineingedrückt.
Die Dreifach-T-Anker-Maschine als Generator:
Es soll im nachfolgenden Text die Beschreibung der elektrophysikalischen Vorgänge in der Dreifach-T-Anker-Maschine wiedergegeben werden. Beidemal lässt sich die Generatorfunktion mit dem Lorentz-Kraft-Gesetz erklären, bei der Dreifach-T-Anker-Maschine muss noch die Theorie eines Hineinführens und Herausnehmens eines Magnetfeldes in bzw. durch eine Leiterschleife bzw. eine Spule mit herangezogen werden. Dabei existiert das Faktum, dass die Spule sich quasi dagegen wehrt, dass in sie magnetische Feldlinien hineingeführt und herausgenommen werden. Das heißt, dass ein Elektronenstrom induziert wird, der an der Innenseite der Spule ein Magnetfeld bewirkt, das sich antiparallel zu den hineingeführten Magnetfeldlinien und parallel zu den herausgenommenen Magnetfeldlinien richtet. Diese Theorie steht im Physikbuch von Hans J. Paus im Kapitel 27.5, Bild 27.9 auf Seite 343. In dem Text zu dem Bild ist der Sachverhalt allerdings falsch herum beschrieben.
Es soll das Statorfeld Oben seinen Nordpol haben und Unten seinen Südpol. Wenn eine Kommutator-Blechlamelle oben steht, dann liegen zwei T-Anker nach links oben und nach rechts oben gerichtet auf der oberen Hälfte des Ankerrades.
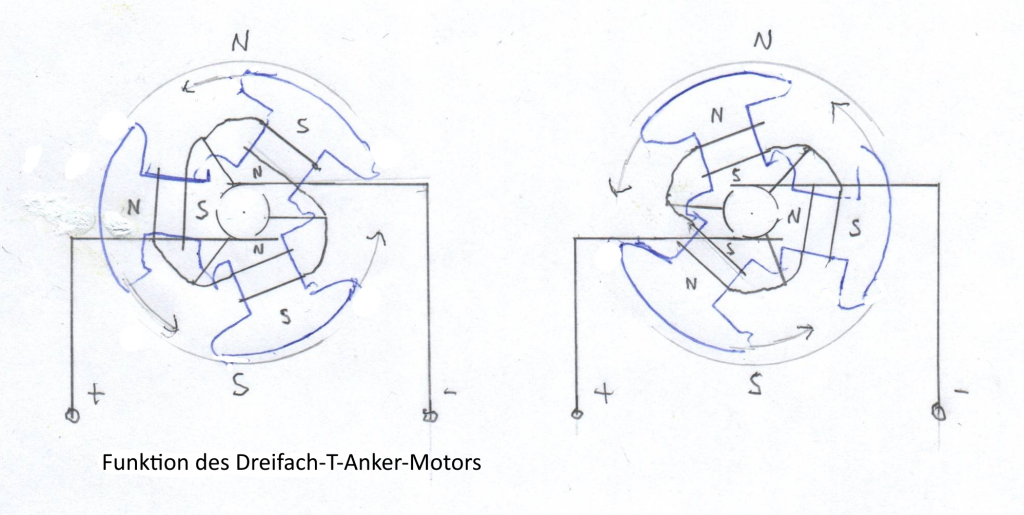
Motorfunktion:
Nun stelle man sich vor, dass in die obere Kommutator-Blechlamelle negative Spannung eingespeist wird. Dann dreht sich das Ankerrad oben nach links, es dreht sich also gegen den Uhrzeigersinn. Wenn man das mit der Linken-Faust-Regel nachbildet, merkt man, dass am rechten oberen Anker magnetischer Südpol herrscht. Der Anker wird also von dem oberen Ständerteil, das mit magnetischem Nordpol polarisiert ist, angezogen. Wenn man mit der Linken-Faust-Regel den Strom im linken oberen Anker nachbildet, merkt man dass am linken oberen Anker magnetischer Nordpol herrschen muss. Der linke obere Anker wird also von dem oberen Ständerteil abgestoßen.
Wenn man nun den linken unteren Anker betrachtet merkt man bei einer Nachbildung mit der Linken-Faust-Regel, weil der untere Ständerteil magnetisch auf Südpol polarisiert ist, dass der linke untere Anker von dem unteren Ständerteil angezogen wird, weil er auf magnetischen Nordpol polarisiert ist. Zum Schluß kommt man auf den rechten unteren Anker, der auf magnetischen Südpol polarisiert ist, weswegen er hier abgestoßen wird. Die Drehrichtung des Motor ist somit gegen den Uhrzeigersinn gerichtet. Es bestehen also vier Quadranten, aber gleichzeitig sind trotzdem nur drei Anker vorhanden. Bei der Betrachtung als Generator sind die magnetischen Pole an den Enden der Anker jeweils ins Gegenteil umgekehrt, weil um den Generator zu betreiben, mechanische Arbeit aufgewendet wird, weswegen sich das Ankerrad gegen die Drehung wehrt.
Generatorfunktion:
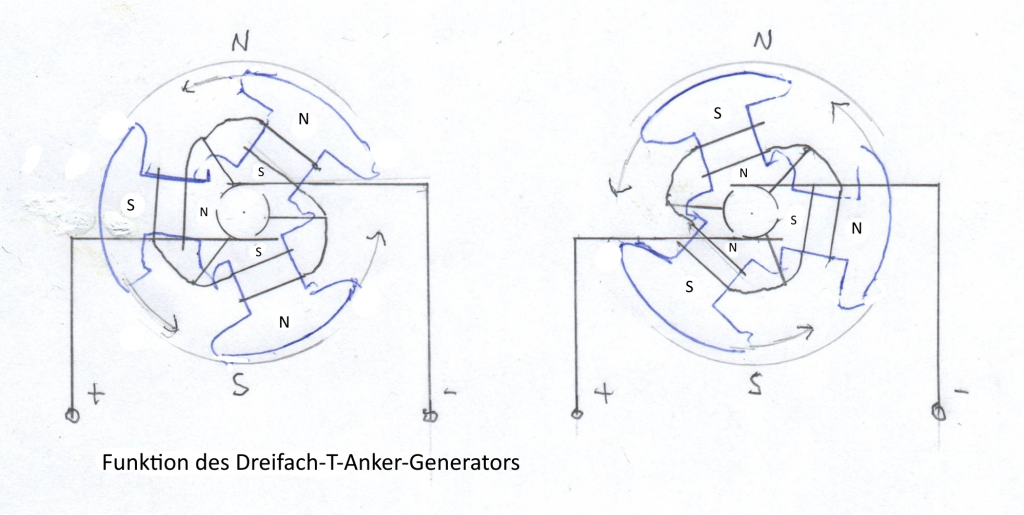
Das Statorfeld baut sich also im linken oberen Anker ab, da der Anker sich aus dem Statorfeld herausdreht. Die Spule wehrt sich dagegen, dass die magnetischen Feldlinien aus ihr herausgenommen werden. Es wird daher ein Strom induziert der an der Innenseite der Spule, also da wo die magnetischen Feldlinien hinein und hinaus gehen, ein Magnetfeld hat, das in die gleiche Richtung zeigt wie das Statormagnetfeld das ja hier allmählich verschwindet. Wenn man das mit der Linken-Faust-Regel nachbildet, stellt man fest, dass der Elektronenstrom in Richtung der Kommutator-Blechlamelle geht. Es wird also an der Kommutator-Blechlamelle ein negatives Potential erzeugt. Durch die gleiche Polarisierung wie bei der Motorfunktion ist die Generatorfunktion bestätigt. Wenn man das nochmals mit der Linken-Faust-Regel nachbildet, stellt man fest, dass an dem linken oberen Anker magnetischer Südpol und nicht Nordpol wie bei der Motorfunktion vorherrscht. Der linke obere Anker wird also von dem oberen Ständerteil angezogen, bzw. zurückgezogen, was der Drehung als Generator gegen den Uhrzeigersinn hemmt, was bei der Generatorfunktion der Fall sein muss.
Nun soll nochmals erläutert werden wie es aussieht, wenn eine Kommutator-Blechlamelle sich unten befindet:
Zwei T-Anker befinden sich dann links und rechts nach unten zeigend. Es soll der linke Anker umschrieben werden:
Der linke, untere Anker taucht, weil sich das Ankerrad gegen den Uhrzeigersinn dreht, in das Feld nahe des Südpols ein. Das Feld wird jetzt allmählich immer mehr in den Anker hineingeführt. Die Spule des Ankers wehrt sich dagegen, dass die Magnetfeldlinien in sie hineingeführt werden. Es muss also ein Strom induziert werden der an der Innenseite der Spule, also da wo die magnetischen Feldlinien hineingeführt und herausgeführt werden, ein Magnetfeld erzeugt das in die entgegengesetzte Richtung zeigt wie das Statormagnetfeld. Wenn man das mit der linken-Faust-Regel nachbildet, stellt man fest, dass der Elektronenstrom von der unteren Kommutator-Blechlamelle wegführt, was bedeutet, dass dort eine positive Polarisierung herrscht. Das stimmt wieder mit der Polarisierung der Schleifkontakte als Motor überein, wodurch die Generatorfunktion bestätigt ist. Weiterhin kann man sagen, dass am Ende des linken unteren Ankers Südpol herrscht, was man feststellt, wenn man den Strom mit der Linken-Faust-Regel nachbildet. Der linke untere Anker wird also von dem unteren Ständerteil, der mit magnetischem Südpol polarisiert ist abgestoßen, weil an seinem Ende magnetsicher Südpol herrscht, was auch wieder der Generatorfunktion entspricht. Die Drehrichtung ist bei der Betrachtung als Motor und als Generator gegen den Uhrzeigersinn gerichtet.
Es bleibt der Vollständigkeit wegen noch zu sagen, dass wenn bei der vergleichsweisen Betrachtung zwischen Motorbetrieb und Generatorbetrieb die Schleifer gleich gepolt sind, der Strom jeweils in die entgegengesetzte Richtung fließt, weswegen die magnetische Polarität der Anker bei einerseits Motor- und andererseits Generatorbetrieb jeweils entgegengesetzt ist.
Autor dieses Dokumentes:
Benjamin Kind
Ostlandstraße 44
73540 Heubach
geboren am 05.06.1977 in Mutlangen bei Schwäbisch Gmünd
meine beiden Eltern sind von norddeutscher und polnischer Herkunft
Quellen:
Internet:
– https://www.eti.kit.edu/1376.php
– Wikipedia
Bücher:
– Anleitung für den Kosmos-Baukasten Elektrotechnik
– Elektrotechnische Grundlagen, Heinz Meister, Vogel-Buchverlag Würzburg, 2012
– Physik in Experimenten und Beispielen, Hans J. Paus, Carl Hanser Verlag München Wien, 1995
– Elektrische Maschinen, Rolf Fischer, 16. aktualisierte Auflage, Carl Hanser Verlag München, 2013
– Wicklungen elektrischer Maschinen, F. Heiles, Springer Verlag Berlin Heidelberg, 1953, Neudruck 2014
– Buch Das Bertelsmann Bildungs Buch, Kapitel Physik, C. Bertelsmann-Verlag Gütersloh, 1959